The Mapper
The Mapper Project
The Mapper is a project focused on robotics and mapping technologies. It aims to create an efficient and accurate mapping system using advanced robotics.
Project Highlights
- Advanced Mapping: Developed a sophisticated mapping system that enhances accuracy and efficiency.
- Robotics Integration: Integrated advanced robotics technologies to improve mapping capabilities.
- Real-time Data Processing: Implemented real-time data processing for immediate mapping updates.
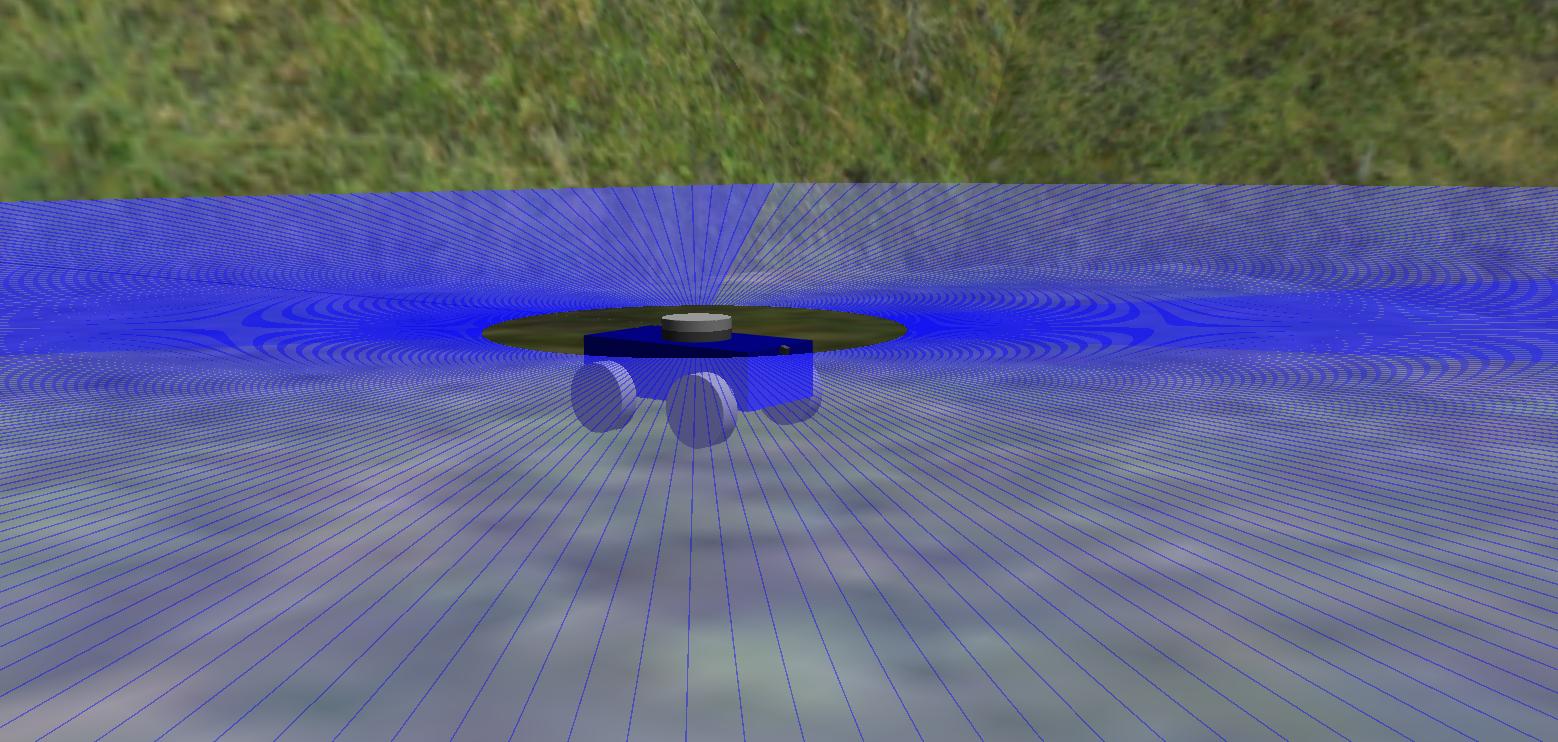
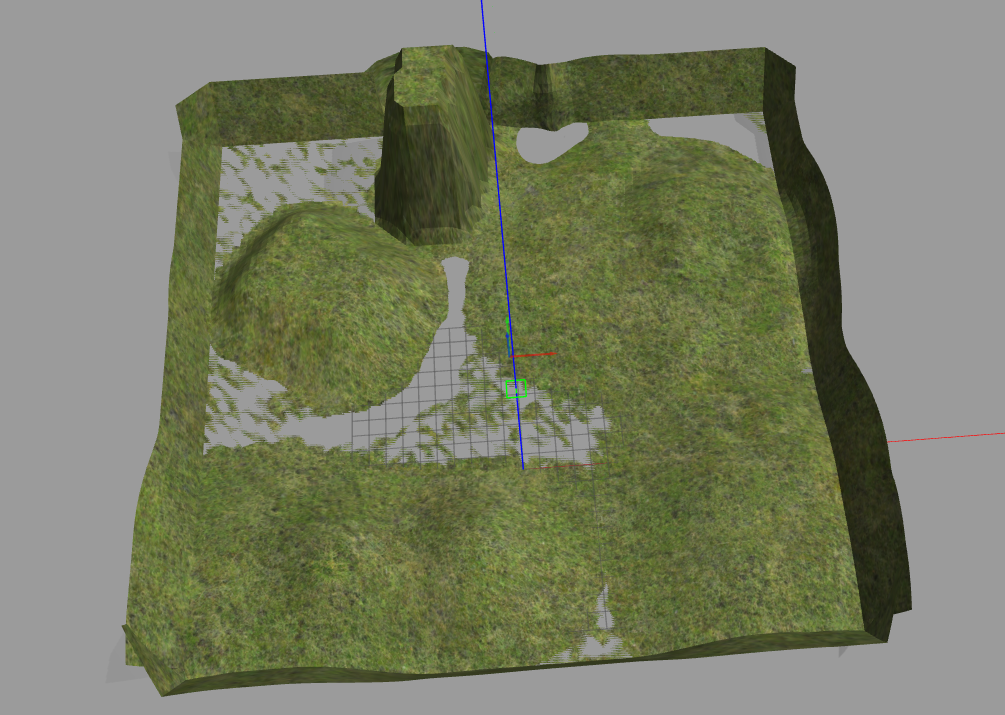
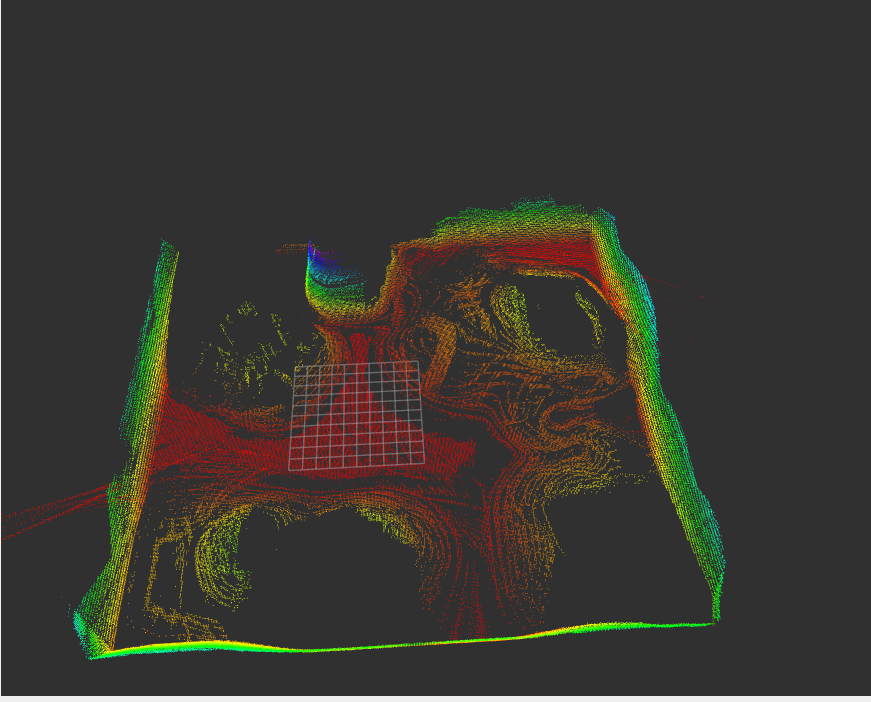
- ROS2 Package Development: Created a ROS2 package that generates a 3D map using a 2D LiDAR, significantly enhancing the mapping capabilities.
Through this project, we leveraged a range of robotics and mapping technologies, advancing our expertise in real-time data processing and autonomous systems. The work contributed to improved mapping accuracy and reliability in dynamic environments.
Current Status
The project is currently a work in progress. We are actively developing and testing new features to enhance the mapping capabilities. Our focus is on improving the accuracy of the mapping system and integrating more advanced robotics technologies. Additionally, the physical hardware is currently in progress.
Future Plans
- Enhance the mapping algorithms to increase accuracy and efficiency.
- Integrate additional sensors for better data collection and processing.
- Develop a user-friendly interface for easier interaction with the mapping system.
- Conduct extensive field tests to validate the system in real-world environments.
Project information
- Category Robotics
- Project dateJuly, 2024
- Status Work in Progress