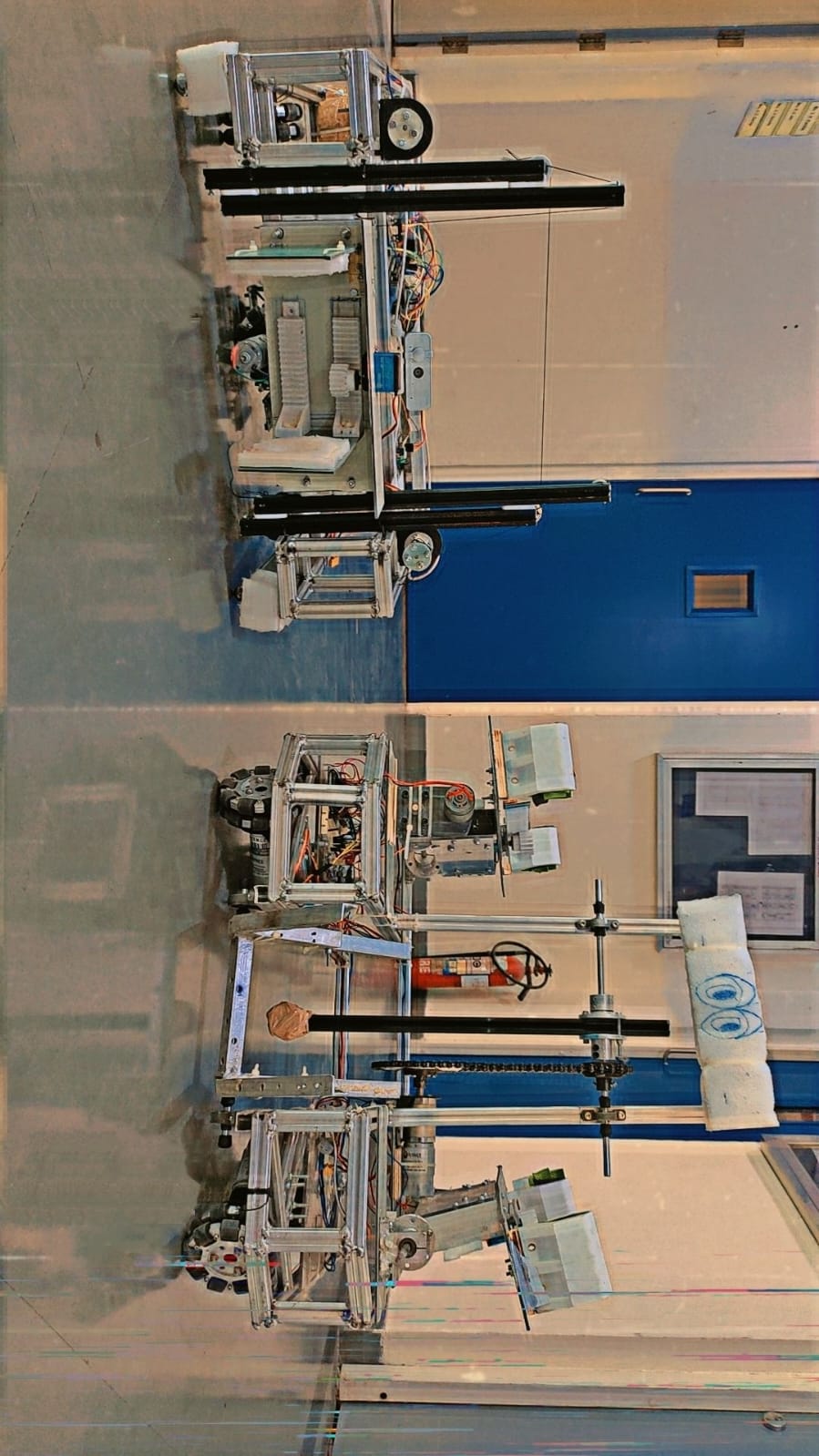
R1 and R2


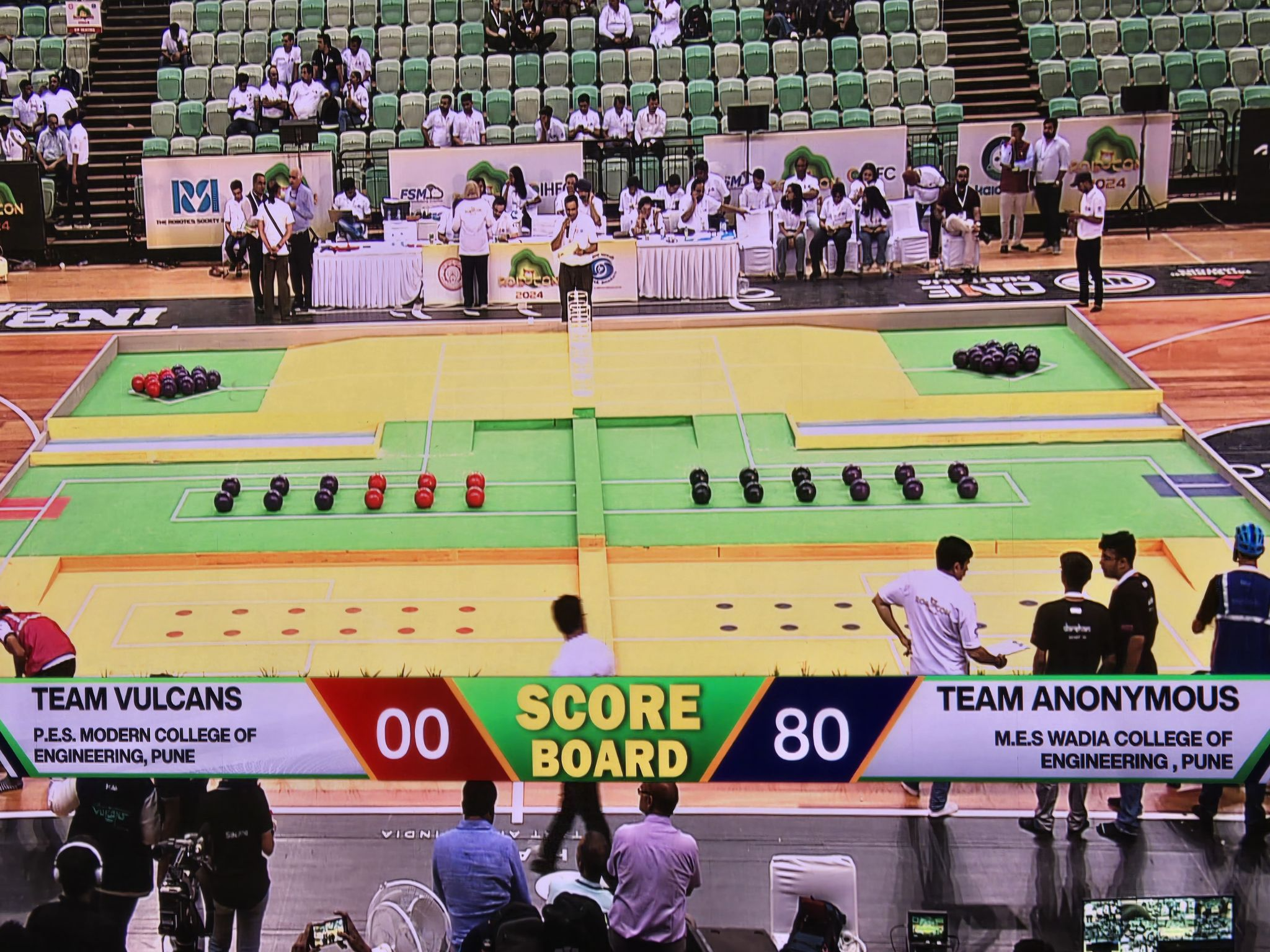


Robotics Lead - Robocon 2024
As the Robotics Lead for Robocon 2024, I directed research and development to enhance robot functionalities, focusing on both innovation and efficiency. This role involved extensive work on control systems, autonomous navigation, and real-time mapping using advanced robotics technologies.
Project Highlights
- Directed R&D: Developed Robot 1 and Robot 2, implementing advanced control systems that boosted operational efficiency by 20%.
- ROS2 and URDF Implementation: Deployed ROS2 and created a Unified Robot Description File (URDF) for Robot 2, integrating encoders, LiDAR, IMU, and cameras to enhance sensor fusion and perception.
- Gazebo Simulations: Conducted comprehensive simulations using Gazebo to test and refine robot behaviors in a controlled environment.
- SLAM and Path Planning: Integrated Simultaneous Localization and Mapping (SLAM) and path planning for Robot 2, enabling accurate real-time mapping and autonomous navigation.
Through this project, I leveraged a range of robotics and embedded systems technologies, advancing my expertise in ROS2, Gazebo, and autonomous navigation systems. The work contributed to improved robot accuracy and reliability in dynamic, real-world environments.
Project information
- CategoryRobotics
- Project date 13 July, 2024